复习一下向量空间(Vector Space)的定义:
向量空间 \(V\) 是一个非空集合,它上的元素称为向量,满足两个运算:加法和数乘,并且得到的结果还在该集合中。
这两个运算必须满足以下 8 条公理(向量空间公理):
(一)加法的性质u(对任意 \(\mathbf{u}, \mathbf{v}, \mathbf{w} \in V\)):
- 交换律: \(\mathbf{u} + \mathbf{v} = \mathbf{v} + \mathbf{u}\)
- 结合律:\((\mathbf{u} + \mathbf{v}) + \mathbf{w} = \mathbf{u} + (\mathbf{v} + \mathbf{w})\)
- 零向量存在性:存在 \(\mathbf{0} \in V\),使得 \(\mathbf{v} + \mathbf{0} = \mathbf{v}\)
- 负向量存在性:对每个 \(\mathbf{v} \in V\),存在 \(-\mathbf{v} \in V\),使得 \(\mathbf{v} + (-\mathbf{v}) = \mathbf{0}\)
(二)数乘的性质(对任意 \(\mathbf{u}, \mathbf{v} \in V\)):
- 结合律:\(a(b \mathbf{v}) = (ab) \mathbf{v}\)
- 单位元作用:\(1 \cdot \mathbf{v} = \mathbf{v}\),其中 \(1\) 是乘法单位元
- 分配律(标量加法):\(\mathbf{v} = a\mathbf{v} + b\mathbf{v}\)
- 分配律(向量加法):\(a(\mathbf{u} + \mathbf{v}) = a\mathbf{u} + a\mathbf{v}\)
矩阵空间的引入
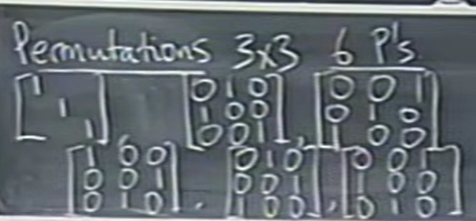
那么,考虑所有\(3 \times 3\)的矩阵,它们其实也构成一个向量空间,因为它们满足上述所有公理。这个向量空间叫做\(3 \times 3\)的矩阵空间,记作\(M_{3 \times 3}(\mathbb R)\)。
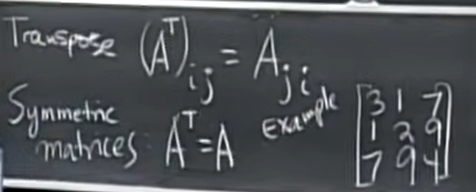
\(M_{3 \times 3}(\mathbb R)\)的子空间有:所有\(3 \times 3\)的对称矩阵空间、所有\(3 \times 3\)的上三角矩阵空间等等。
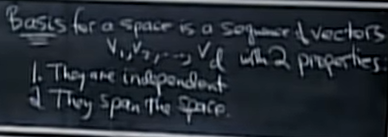
矩阵空间的基
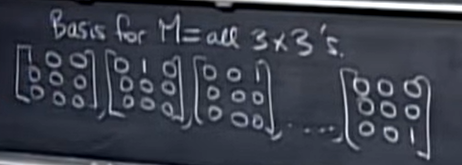
显然,\(M_{3 \times 3}\)的基有\(9\)个。
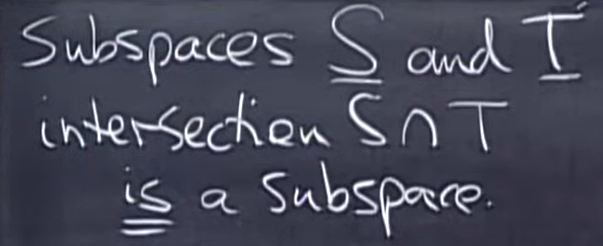
而\(S\)空间(对称矩阵空间)和\(U\)空间(上三角矩阵空间)作为子空间,它们的维度都是\(6\)。另外,它们的交集维度是\(3\);它们的和(也就是任意两个的线性组合构成的大空间)的维度是\(9\),也就是整个空间。
我们很自然地找到了一个公式:\(dim\ S+dim\ U = dim(S\cap U) + dim(S + U)\)